
OpenCPN, selon Shoreline
OpenCPN, selon Shoreline |
| Plan du
site ---> Dossiers techniques
---> Les normes NMEA et les phrases |
| DT_31 | Les normes NMEA et les phrases NMEA |
| Validité
: 4.2 |
| Les
anciens bus propriétaires : |
|
|
Up |
| NMEA
0183, NMEA 400, NMEA 2000 : |
||
|
Up |
|
| Phrase NMEA : Késako ? What is this ? Cé koa ? Que cosa e ? | ||
|
||
| GPS et Phrases NMEA : | ||
|
Up | |
|
||
| Structure
interne d'une phrase : |
||
|
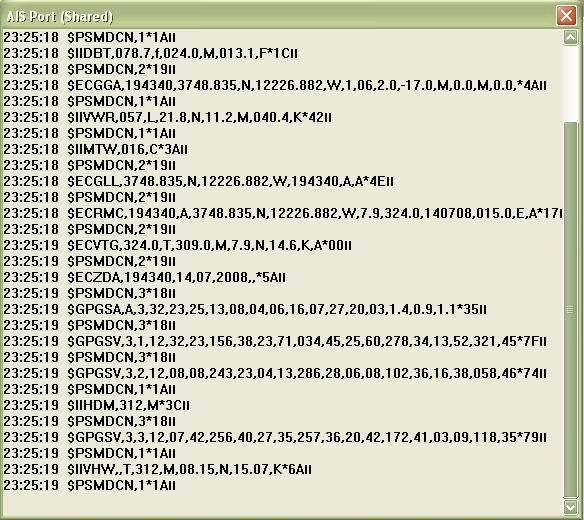 Ci dessus, un contenu de la
fenêtre de débugage.
|
Up Up |
|
Up |
|
| Structure
des noms des phrases NMEA |
|
||||
| AI |
AIS : Automatic Information System | EC
|
Electronic Chart Display & Information System (ECDIS) | |
| GP | Global
Positioning System receiver |
CD | Digital Selective Calling (DSC) | Up |
| LC | Loran-C receiver | GL | GLONASS, according to IEIC 61162-1 | |
| II |
Integrated Instrumentation | GN | Mixed GPS and GLONASS data, according to IEIC 61162-1 | |
| IN | Integrated Navigation | |||
|
||||
| Quelques
types de phrases NMEA plus ou moins courants : |
||||
|
||||
| AAM
APA APB BOD BWC BWR GGA GLL HDM HDT |
Alarme
d’arrivée point de route Phrase ”A” pilote automatique (ancienne version) Phrase ”B” pilote automatique” Relèvement de la destination d’origine Relèvement et distance au point de route Relèvement et distance au point de route (ancienne version) Données de positionnement sur le globe (GPS) Position géographique, Latitude/Longitude Cap, magnétique Cap, vrai |
RMA RMB RMC SNA VDR VDG VWR WPL XTE ZDA |
Données
Loran spécifiques minimales Informations minimales de navigation Données GPS/Transit spécifiques minimales Etats navigation Sens et vitesse de la dérive Route corrigée et vitesse sur le fond Vitesse et direction du vent relatif Emplacement du point de route Ecart de route traversier, mesuré Heure & date |
Up |
| Que fait OpenCPN avec les phrases : | ||||
|
Up |
|||
|
|
Up |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Up Up |
|
|
| Informations
contenues dans chaque type de phrase : |
| HDM Une information, le cap magnétique. | |
| HDG Deux informations, le cap magnétique et la déviation magnétique. | |
| HDT Une information, le cap vrai. | |
RMB
- Informations minimales recommandées :
|
Up |
RMC
- Information minimale recommandée :
|
Up |
WPL
- Position du waypoint
|
Up |
RTE
- Routes
|
Up |
GGA
- Donnée de positionnement global du système.
|
Up |
GLL
- Position géographique, Latitude / Longitude
|
Up |
GSV
- Satellites vus
|
Up |
VTG
- Qualité de la trace et vitesse fond
|
Up |
VDM
- Système d'information automatique (AIS) rapports de position des
cibles
|
Up |
VDO
- AIS : Automatic Information System. Comptes rendus de position
à
partir de son propre bateau
|
Up |
TTM -
Tracked target message, Message des cibles AIS suivies
|
Up |
| TLL
Target latitude and longitude Latitude et longitude de la cible $--TLL, 00, 3445.678, N, 13521.234, E, a,b,c,d, 121530, T, R*A5<CR><LF>
|
Up |
| OSD -
Own Ship Data - Données de mon propre bateau (pour l'AIS). $--OSD,x.x,A,x.x,a,x.x,a,x.x,x.x,a*hh<CR><LF>
|
Up |
| RSD -
RADAR System Data $--RSD,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a,a*hh<CR><LF>
|
Up |
DBT
Profondeur sous le sondeur$--DBT,x.x,f,x.x,M,x.x,F*hh
|
Up |
| DPT -
Depth of Water Profondeur d'eau. $--DPT,x.x,x.x*hh
|
Up |
| MTA
- Température de l'air. $--MTA,x.x,C*hh
|
Up |
| MDA -
Meteorological Composite, Données météorologiques Température de l'air et de l'eau, humidité, point de rosée, vitesse du vent, direction relative par rapport à la surface de la terre. $--MDA,x.x,I,x.x,B,x.x,C,x.x,C,x.x,x.x,x.x,C,x.x,T,x.x,M,x.x,N,x.x,M*hh
Approuvée, par le comité standard NMEA 0183, le 1 octobre 2008 |
Up |
| MTW -
Mean Temperature of Water $--MTW,x.x,C*hh
|
Up |
| VLW -
Distance parcourue sur l'eau $--VLW,x.x,N,x.x,N*hh
|
Up |
| MWV -
Vitesse et angle du vent. $--MWV,x.x,a,x.x,a*hh
|
Up |
| RSA -
Angle de barre $--RSA,x.x,A,x.x,A*hh
|
Up |
| VHW -
Vitesse par rapport à l'eau et cap suivi $--VHW,x.x,T,x.x,M,x.x,N,x.x,K*hh
|
Up |
| VWR -
Vitesse relative du vent et angle du vent $--VWR,x.x,a,x.x,N,x.x,M,x.x,K*hh
|
Up |
| VWT -
Vitesse vraie du vent et angle du vent Angle vrai du vent par rapport au cap suivi par le bateau et vitesse du bateau par rapport à l'eau. L'angle vrai du vent est la somme des vecteurs vent apparent et vitesse du bateau par rapport à l'eau. Il indique le vent que subirait le bateau s'il était immobile sur l'eau en étant orienté en direction de son cap $--VWT,x.x,a,x.x,N,x.x,M,x.x,K*hh
|
Up |
| ZDA -
heure et date , UTC, jour, mois, année et fuseau horaire. $--ZDA,hhmmss.ss,xx,xx,xxxx,xx,xx*hh
|
Up |
| APB
- La phrase Autopilote format B est envoyée par certains gps pour
permettre aux utilisateurs d'utiliser un système de contrôle du pilote
automatique. Cette phrase contient des informations d'alertes.
(cross-track-error, waypoint arrival status, initial bearing from
origin
waypoint to the destination, continuous bearing from present position
to destination and recommended heading-to-steer to destination waypoint
for the active navigation leg of the journey.) Nota bene : Certains pilotes automatiques comme les Roberson, interprètent l'expression "Relèvement de la destination, vue de l'origine" comme "Relèvement de la destination vue de position actuelle". Ceci est du aux différences entre la phrase APA et la phrase APB. For the APA sentence this would be the correct thing to do for the data in the same field. APA only differs from APB in this one field and APA leaves off the last two fields where this distinction is clearly spelled out. This will result in poor performance if the boat is sufficiently off-course that the two bearings are different. $GPAPB,A,A,0.10,R,N,V,V,011,M,DEST,011,M,011,M*3C Où : APB Autopilot format B A Loran-C blink/SNR warning, general warning A Loran-C cycle warning 0.10 cross-track error distance R steer Right to correct (or L for Left) N cross-track error units - nautical miles (K for kilometers) V arrival alarm - circle V arrival alarm - perpendicular 011,M magnetic bearing, origin to destination DEST destination waypoint ID 011,M magnetic bearing, present position to destination 011,M magnetic heading to steer (bearings could True as 033,T) |
Up |
| NMEA
2000 , quelques données techniques : |
|
Up |
|
|
Up |
|
| En
savoir plus : |
||
|
|
Up |
| Aller au plan du site | |
| Retour haut de page |
| Copyright
: Ce site web est protégé contre toute utilisation
commerciale. Dernière modification de cette page : |